2. Types of acceleration/deceleration
Acceleration of a stepping motor includes “Stepped acceleration/deceleration”, “Linear acceleration/deceleration”, and “S-curve acceleration/deceleration.”
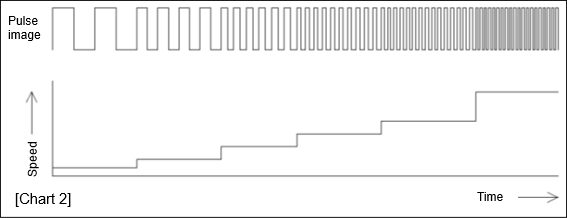
Stepped acceleration/deceleration
Stepped acceleration/deceleration is to change the speed in step-by-step manner. When operating a drive IC by generating pulses from a microcomputer, etc., the reference pulses may be divided to save the resources of the microcomputer.
For example, if 1000 pps pulse is used as the reference, 100 pps (1/10 of 1000 pps), 200 pps (1/5 of 1000 pps), 333pps (1/3 of 1000 pps), 500 pps (1/2 of 10000 pps), 1000 pps (1/1 of 1000 pps), etc. are created, and these are combined in step-by-step manner to accelerate and decelerate.
However, if the division ratio (denominator) becomes smaller, the speed difference becomes large, therefore, a motor cannot follow the speed changes depending on the load (e.g., increase from 500 pps to 1000 pps).
Linear acceleration/deceleration
Linear acceleration/deceleration is to change the speed linearly, and it can be created by using pulse-generating LSIs (e.g., NPM’s PCL and PCD series.) or microcomputers with sufficient resources.
Linear acceleration/deceleration can perform smoother acceleration/deceleration comparing to stepped acceleration/deceleration, which may be resulting in better motor following.
In addition, when using a pulse generation LSI, the width of the first pulse becomes narrower than the pulse width calculated by the starting speed since the acceleration starts internally at the same time as the operation start.
If you want to start at the starting speed without fail, there is a function called “Idling pulse”, which starts accelerating after operating for several pulses at the starting speed.

S-curve acceleration/deceleration
S-curve acceleration/deceleration is to generate pulses so as to reduce the acceleration rate change at the start of acceleration and at the end of acceleration. It is used to suppress the vibration of the machine and make the movement smoother. You can create S-curve acceleration/deceleration easily by using pulse generate LSIs of NPM or microcomputers with sufficient resources.
The speed curves of S-curve acceleration/deceleration include quadratic functions, sine waves, and cycloid curves (NPM adapts quadratic functions).
However, the characteristics of S-curve acceleration/deceleration may not appear in low speed operations when the difference between starting speed and operating speed is small and the pulse speed changes are small, or when the number of pulses used for acceleration/deceleration is small.

https://www.pulsemotor.com/global/Engineering/Special-features/stepping-motor-drive-IC_08.html
Acceleration and deceleration of stepping motors | Engineering | Nippon Pulse Motor Co., Ltd.
“Impress, not just satisfy” Since Nippon Pulse Motor's founding in 1952, our core business has been offering superior motion control products. We will continue to enhance our technologies and ensure our customers receive innovative products of the high
www.pulsemotor.com
댓글